URRÀ project
ГИБКАЯ ЦИФРОВАЯ ЧЕЛОВЕЧЕСКАЯ "ФАБРИКА БУДУЩЕГО" ЛАБОРАТОРИЯ
POR FESR 2014 – 2020 2014/2020 – 2.1 Поддержка реализации сложных проектов в области исследований и разработок по нескольким значимым тематическим направлениям и применению технологических решений, способствующих реализации S3, ссылка POR MARCHE FESR 2014/2020 – ОСЬ 1 – ОС 2 – ДЕЙСТВИЕ 2.1 ПОДДЕРЖКА РАЗВИТИЯ ТЕХНОЛОГИЧЕСКИХ ПЛАТФОРМ ДЛЯ СОВМЕСТНЫХ ИССЛЕДОВАНИЙ, РАЗРАБОТКИ И ИННОВАЦИЙ В ОБЛАСТЯХ УМНОЙ СПЕЦИАЛИЗАЦИИ: ТЕМАТИЧЕСКАЯ ОБЛАСТЬ «Интегрированное и ориентированное на пользователя проектирование» № 271 – 28/12/2017, ссылка Заявка на участие №14819, 529587|14/05/2018|R_MARCHE|GRM|IRE|A|330.30/2017/IRE/52 – Проект HD3FLAB.
УЧАСТНИКИ
Университет Политехника делле Марке, Университет Камерино, Меккано, Локциони, Альчи, Балди, Бора, Кадланд, Э-Лиос, Элетика, Элика, Евросуоле, Филиппетти, Джойтек, Кучине ЛУБЕ, Мекканотехника Центро, Намириаль, Наутес, Проэл Лаб, Симонелли групп, Виниталия, Заннини.
ЦЕЛИ ДОСТИГНУТЫ
Компания LUBE Industries srl приняла участие в проекте URRA', который возник в результате соглашения ATI между важными компаниями из региона Марке, предусматривавшего изучение, внедрение и валидацию процессов сотрудничества между роботами и человеком, а также для реконфигурации CPS (Киберфизическая система).
Благодаря кластеру и участию всех партнеров проекта, LUBE увеличила свои знания в области применения коллаборативной робототехники, предложив прикладные кейсы, непосредственно заимствованные из собственной реальности и производственных потребностей, вплоть до создания коллаборативного острова для поддержки обработки и завинчивания деревянных деталей.
СИСТЕМА КОЛЛАБОРАЦИОННОГО РОБОТА ДЛЯ СБОРКИ КУХОННОЙ МЕБЕЛИ
В LUBE были рассмотрены и разработаны два приложения, предусматривающие сотрудничество между оператором и роботом.
Первое приложение заключается в изучении и разработке роботизированной системы, которая работает на сборочной линии и поддерживает оператора в заключительных этапах сборки, регистрации, очистки и контроля качества перед упаковкой мебели. Была разработана и спроектирована система сотрудничества человек-робот, в которой робот размещает мебель в оптимизированной позиции в зависимости от антропометрических характеристик оператора, размеров продукта и специфических характеристик задачи. Цель состоит в том, чтобы обеспечить большую безопасность и снизить эргономические риски для оператора. Разработанная система интегрирует различные устройства и различные технологии. В частности, она позволяет распознавать присутствие человека, продукт и требования задачи и, соответственно, адаптировать положение продукта и конфигурацию робота. В этой связи был разработан оптимизационный модель, который позволяет автоматически определять положение продукта, соблюдая технологические и эргономические ограничения и минимизируя расстояние между выбранной оператором позицией продукта и теоретически идеальной среди всех допустимых позиций. Кроме того, была реализована система камер, которая позволяет воссоздавать человеческий скелет и вычислять основные анатомические углы для оценки эргономического риска ненавязчивым образом и в реальном времени. Наконец, система и модель были испытаны в лаборатории с отличными результатами.
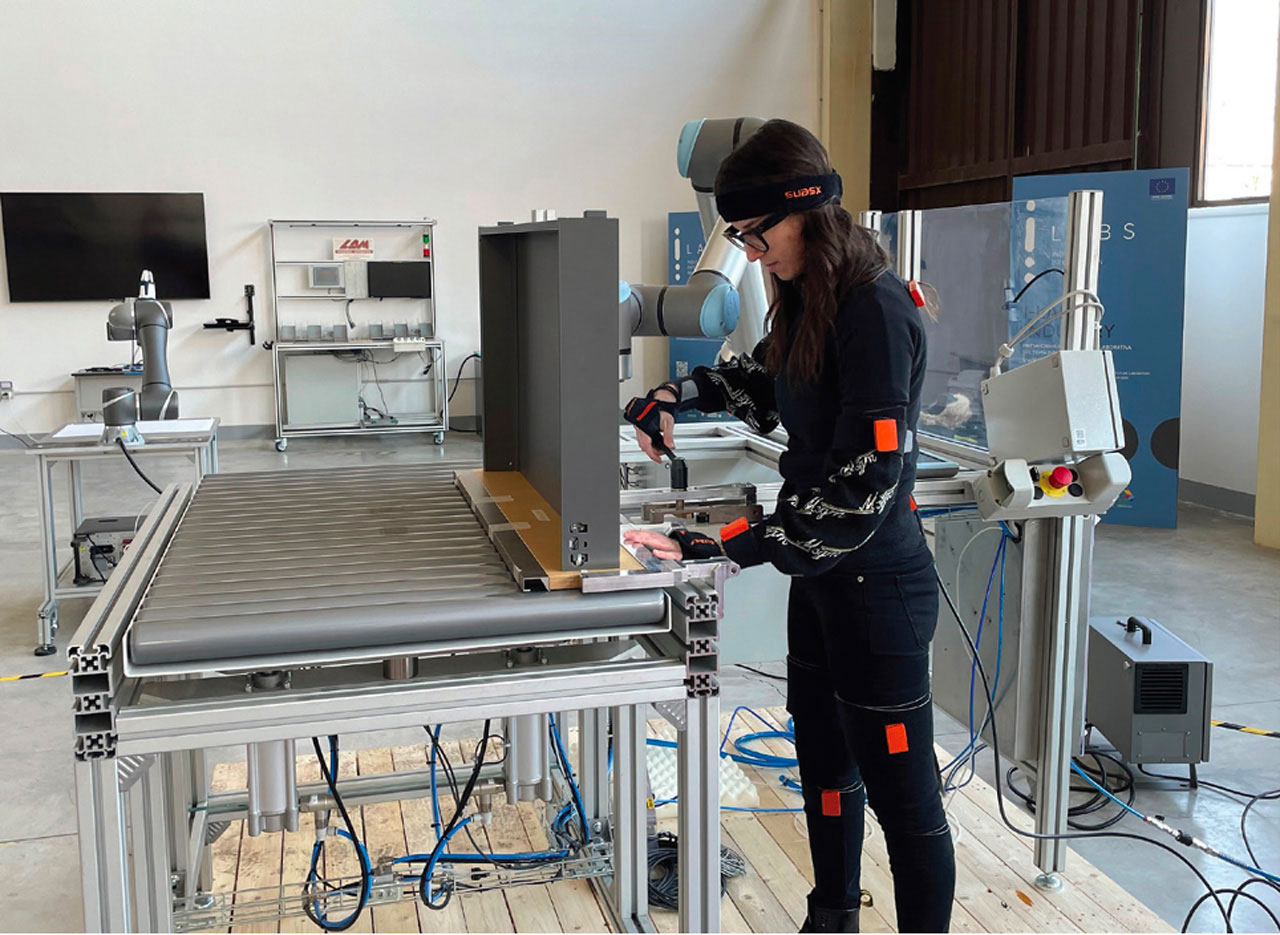
Второе приложение рассматривало изучение, разработку и реализацию коллаборативной роботизированной системы для вкручивания винтов в кухонные ящики. Анализ производительности и эргономики трех ручных рабочих станций на линии сборки ящиков выявил эргономические риски, связанные с повторяющимися движениями и неправильными позами. Поэтому было решено ввести коллаборативного робота, полностью изменить планировку станции и сбалансировать линию, чтобы облегчить операцию завинчивания, при этом обеспечивая необходимый уровень производительности. Была спроектирована и реализована коллаборативная ячейка, проведен анализ рисков и различные симуляции процесса, чтобы достичь желаемых результатов с точки зрения эргономики и производительности.




 Google Chrome
Google Chrome  Mozilla Firefox
Mozilla Firefox  Microsoft Edg
Microsoft Edg  Safari
Safari