Progetto URRÀ
HUMAN DIGITAL FLEXIBLE “FACTORY OF THE FUTURE” LABORATORY
POR FESR 2014 – 2020 2014/2020 – 2.1 Supporto alla realizzazione di progetti complessi di attività di ricerca e sviluppo su poche aree tematiche di rilievo e all’applicazione di soluzioni tecnologiche funzionali alla realizzazione della S3, rif. POR MARCHE FESR 2014/2020 – ASSE 1 – OS 2 – AZIONE 2.1 SOSTEGNO ALLO SVILUPPO DI PIATTAFORME TECNOLOGICHE DI RICERCA COLLABORATIVA, SVILUPPO ED INNOVAZIONE NEGLI AMBITI DELLA SPECIALIZZAZIONE INTELLIGENTE : AREA TEMATICA “Progettazione integrata e user-centered” n. 271 – 28/12/2017, rif. Domanda di partecipazione n.14819, 529587|14/05/2018|R_MARCHE|GRM|IRE|A|330.30/2017/IRE/52 – Progetto HD3FLAB.
PARTECIPANTI
Università Politecnica delle Marche, Università di Camerino, Meccano, Loccioni, Alci, Baldi, Bora, Cadland, E-Lios, Eletica, Elica, Eurosuole, Filippetti, Joytek, Cucine LUBE, Meccanotecnica Centro, Namirial, Nautes, Proel Lab, Simonelli group, Winitalia, Zannini.
OBIETTIVI RAGGIUNTI
LUBE Industries srl ha preso parte al Progetto URRA’ - che nasce con un accordo ATI fra importanti aziende del marchigiano, che prevedeva lo studio, l’implementazione e la validazione dei processi collaborativi fra robot ed uomo e per la riconfigurazione del CPS (Cyber Physical System).
Grazie al cluster e alla partecipazione di tutti i partners di progetto, LUBE ha aumentato il proprio know how riguardo le applicazioni della robotica collaborativa proponendo dei casi studio applicativi mutuati direttamente dalla propria realtà ed esigenze produttive fino alla realizzazione di un’isola collaborativa a supporto delle lavorazioni e delle avvitature di parti in legno.
SISTEMA ROBOTICO COLLABORATIVO PER L’ASSEMBLAGGIO DI MOBILI DA CUCINA
In LUBE sono state prese in esame e sviluppate due applicazioni che prevedono la collaborazione tra operatore e robot.
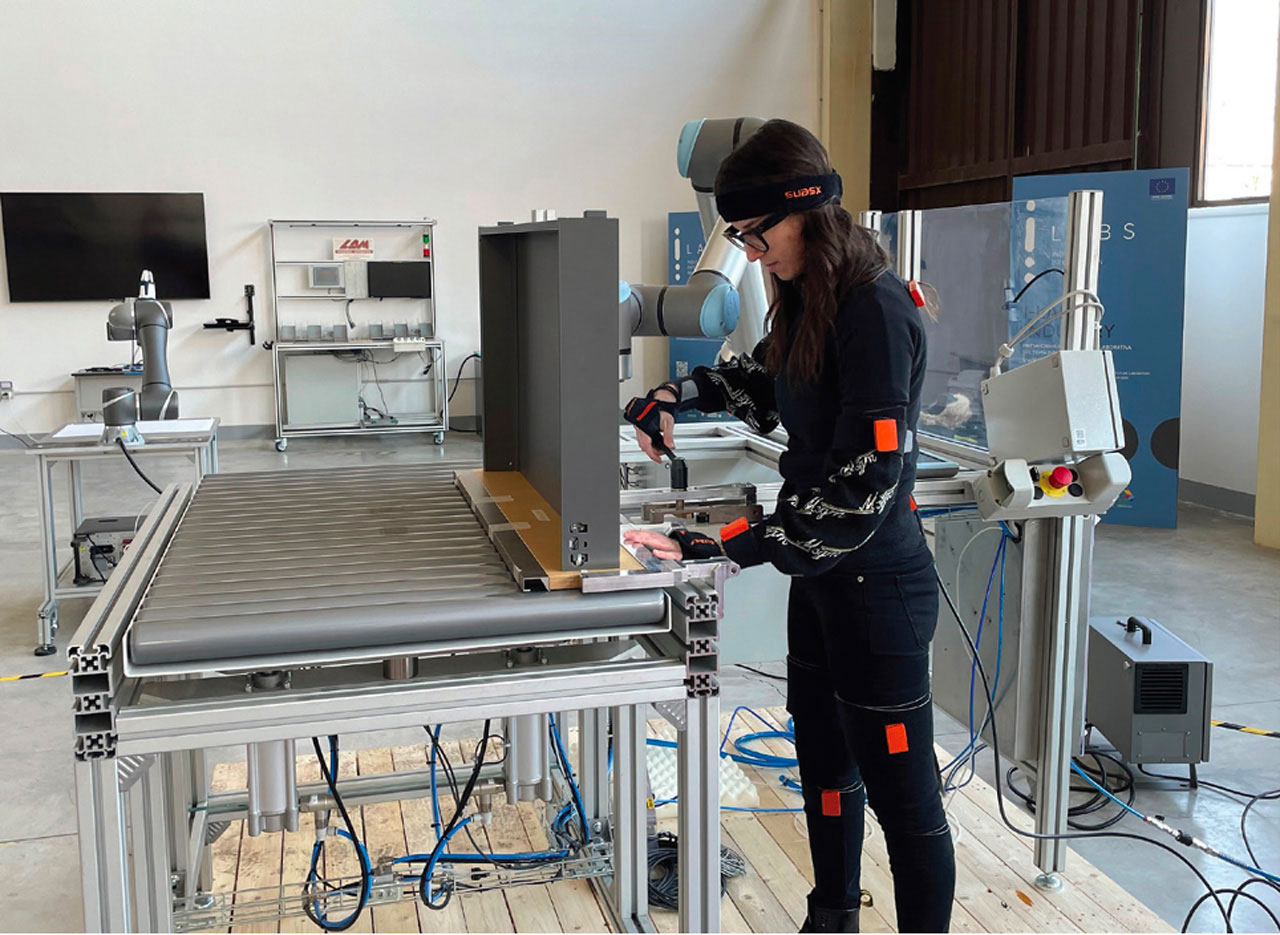
La prima applicazione consiste nello studio e nello sviluppo di un sistema robotico che opera in linea di assemblaggio e supporta l’operatore nelle attività finali di montaggio, registrazione, pulizia e controllo qualità prima dell’imballaggio del mobile. È stato ideato e progettato un sistema di collaborazione uomo-robot in cui il robot posiziona il mobile in una posizione ottimizzata in base alle caratteristiche antropometriche dell’operatore, alle dimensioni del prodotto e alle caratteristiche specifiche del task. L’obiettivo è di garantire una maggior sicurezza e ridurre i rischi ergonomici per l’operatore. Il sistema sviluppato integra diversi dispositivi e differenti tecnologie. In particolare, permette di riconoscere la presenza umana, il prodotto e i requisiti del task e adatta, di conseguenza, la posizione del prodotto e la configurazione del robot. A tal proposito, è stato sviluppato un modello di ottimizzazione che permette di identificare la posizione del prodotto in modo automatico rispettando vincoli tecnologici ed ergonomici e minimizzando la distanza tra la posizione del prodotto scelta dell’operatore e quella teoricamente ideale tra tutte le posizioni ammissibili. Inoltre, è stato implementato un sistema di telecamere che permette di ricostruire lo scheletro umano e calcolare i principali angoli anatomici per poter valutare il rischio ergonomico in modo non invasivo e in real-time. Infine, il sistema e il modello sono stati sperimentati in laboratorio con ottimi risultati.
La seconda applicazione ha considerato lo studio, lo sviluppo e la realizzazione di un sistema robotico collaborativo per l’inserimento delle viti sui cassettoni da cucina. Dall’analisi della produttività e dell’ergonomia di tre postazioni di lavoro manuali della linea di assemblaggio dei cassettoni, sono emersi rischi ergonomici dovuti a movimenti ripetitivi e posture scorrette. Si è deciso, quindi, di introdurre un robot collaborativo, modificare totalmente il layout della stazione e ribilanciare la linea per facilitare l’operazione di avvitatura garantendo comunque il livello di produttività necessario. È stata progettata e realizzata una cella collaborativa, svolgendo l’analisi dei rischi e diverse simulazioni del processo, fino a raggiungere i risultati desiderati in termini di ergonomia e produttività.




 Google Chrome
Google Chrome  Mozilla Firefox
Mozilla Firefox  Microsoft Edg
Microsoft Edg  Safari
Safari