URRÀ project
LABORATORIO “FÁBRICA DEL FUTURO” HUMANO DIGITAL FLEXIBLE
POR FESR 2014 – 2020 2014/2020 – 2.1 Apoyo a la realización de proyectos complejos de actividades de investigación y desarrollo en pocas áreas temáticas de relevancia y a la aplicación de soluciones tecnológicas funcionales a la realización de la S3, ref. POR MARCHE FESR 2014/2020 – EJE 1 – OS 2 – ACCIÓN 2.1 APOYO AL DESARROLLO DE PLATAFORMAS TECNOLÓGICAS DE INVESTIGACIÓN COLABORATIVA, DESARROLLO E INNOVACIÓN EN LOS ÁMBITOS DE LA ESPECIALIZACIÓN INTELIGENTE: ÁREA TEMÁTICA “Diseño integrado y centrado en el usuario” n. 271 – 28/12/2017, ref. Solicitud de participación n.14819, 529587|14/05/2018|R_MARCHE|GRM|IRE|A|330.30/2017/IRE/52 – Proyecto HD3FLAB.
PARTICIPANTES
Universidad Politécnica de las Marcas, Universidad de Camerino, Meccano, Loccioni, Alci, Baldi, Bora, Cadland, E-Lios, Eletica, Elica, Eurosuole, Filippetti, Joytek, Cocinas LUBE, Meccanotecnica Centro, Namirial, Nautes, Proel Lab, Simonelli group, Winitalia, Zannini.
OBJETIVOS ALCANZADOS
LUBE Industries srl ha participado en el Proyecto URRA' - que nace con un acuerdo ATI entre importantes empresas de la región de Las Marcas, que preveía el estudio, la implementación y la validación de los procesos colaborativos entre robots y humanos y para la reconfiguración del CPS (Sistema Ciberfísico).
Gracias al clúster y a la participación de todos los socios del proyecto, LUBE ha aumentado su know-how respecto a las aplicaciones de la robótica colaborativa proponiendo casos de estudio aplicativos tomados directamente de su propia realidad y necesidades productivas hasta la realización de una isla colaborativa en apoyo de los trabajos y atornillados de partes de madera.
SISTEMA ROBÓTICO COLABORATIVO PARA EL MONTAJE DE MUEBLES DE COCINA
En LUBE se han examinado y desarrollado dos aplicaciones que prevén la colaboración entre operador y robot.
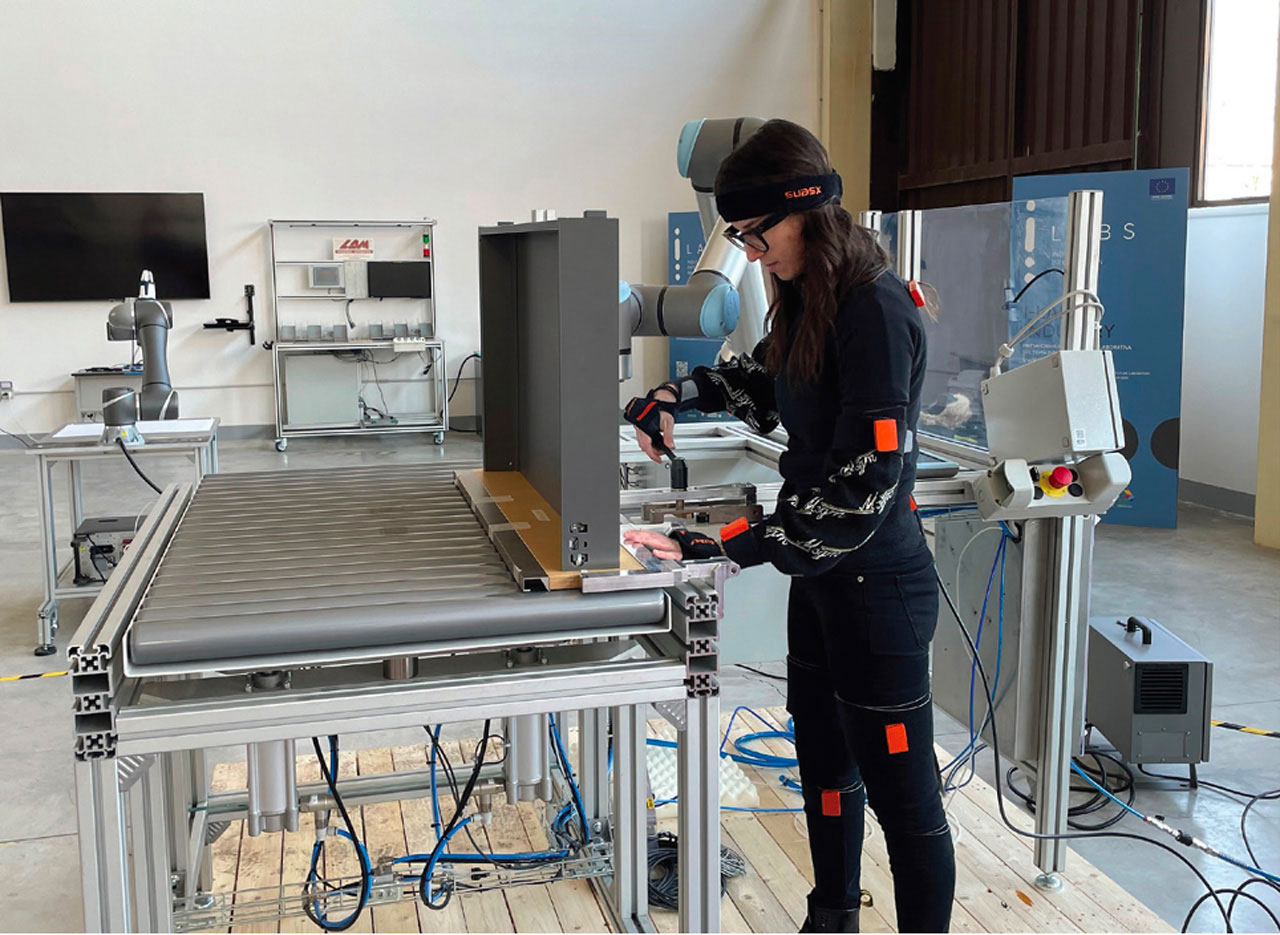
La primera aplicación consiste en el estudio y desarrollo de un sistema robótico que opera en línea de ensamblaje y apoya al operador en las actividades finales de montaje, registro, limpieza y control de calidad antes del embalaje del mueble. Se ha ideado y diseñado un sistema de colaboración hombre-robot en el que el robot posiciona el mueble en una posición optimizada según las características antropométricas del operador, las dimensiones del producto y las características específicas de la tarea. El objetivo es garantizar una mayor seguridad y reducir los riesgos ergonómicos para el operador. El sistema desarrollado integra diferentes dispositivos y distintas tecnologías. En particular, permite reconocer la presencia humana, el producto y los requisitos de la tarea y adapta, en consecuencia, la posición del producto y la configuración del robot. A tal efecto, se ha desarrollado un modelo de optimización que permite identificar la posición del producto de manera automática respetando restricciones tecnológicas y ergonómicas y minimizando la distancia entre la posición del producto elegida por el operador y la teóricamente ideal entre todas las posiciones admisibles. Además, se ha implementado un sistema de cámaras que permite reconstruir el esqueleto humano y calcular los principales ángulos anatómicos para poder evaluar el riesgo ergonómico de manera no invasiva y en tiempo real. Finalmente, el sistema y el modelo han sido experimentados en laboratorio con excelentes resultados.
La segunda aplicación consideró el estudio, desarrollo y realización de un sistema robótico colaborativo para la inserción de tornillos en los cajones de cocina. Del análisis de la productividad y la ergonomía de tres estaciones de trabajo manuales de la línea de ensamblaje de los cajones, surgieron riesgos ergonómicos debido a movimientos repetitivos y posturas incorrectas. Se decidió, por lo tanto, introducir un robot colaborativo, modificar totalmente el diseño de la estación y reequilibrar la línea para facilitar la operación de atornillado garantizando al mismo tiempo el nivel de productividad necesario. Se diseñó y realizó una celda colaborativa, llevando a cabo el análisis de riesgos y diversas simulaciones del proceso, hasta alcanzar los resultados deseados en términos de ergonomía y productividad.




 Google Chrome
Google Chrome  Mozilla Firefox
Mozilla Firefox  Microsoft Edg
Microsoft Edg  Safari
Safari