URRÀ project
HUMAN DIGITAL FLEXIBLE “FACTORY OF THE FUTURE” LABORATORY
POR FESR 2014 – 2020 2014/2020 – 2.1 Support for the implementation of complex research and development projects in a few relevant thematic areas and for the application of technological solutions functional to the realization of the S3, ref. POR MARCHE FESR 2014/2020 – AXIS 1 – OS 2 – ACTION 2.1 SUPPORT FOR THE DEVELOPMENT OF TECHNOLOGICAL PLATFORMS FOR COLLABORATIVE RESEARCH, DEVELOPMENT AND INNOVATION IN THE FIELDS OF SMART SPECIALIZATION: THEMATIC AREA “Integrated and user-centered design” no. 271 – 28/12/2017, ref. Participation application no.14819, 529587|14/05/2018|R_MARCHE|GRM|IRE|A|330.30/2017/IRE/52 – HD3FLAB Project.
PARTICIPANTS
Marche Polytechnic University, University of Camerino, Meccano, Loccioni, Alci, Baldi, Bora, Cadland, E-Lios, Eletica, Elica, Eurosuole, Filippetti, Joytek, Cucine LUBE, Meccanotecnica Centro, Namirial, Nautes, Proel Lab, Simonelli group, Winitalia, Zannini.
OBJECTIVES ACHIEVED
LUBE Industries srl took part in the URRA’ Project - which was born from an ATI agreement among important companies in the Marche region, which envisaged the study, implementation and validation of collaborative processes between robots and humans and for the reconfiguration of the CPS (Cyber Physical System).
Thanks to the cluster and the participation of all the project partners, LUBE has increased its own know-how regarding collaborative robotics applications by proposing application case studies directly drawn from its own reality and production needs, leading to the creation of a collaborative island to support the machining and screwing of wooden parts.
COLLABORATIVE ROBOTIC SYSTEM FOR THE ASSEMBLY OF KITCHEN FURNITURE
In LUBE, two applications were examined and developed that involve collaboration between the operator and the robot.
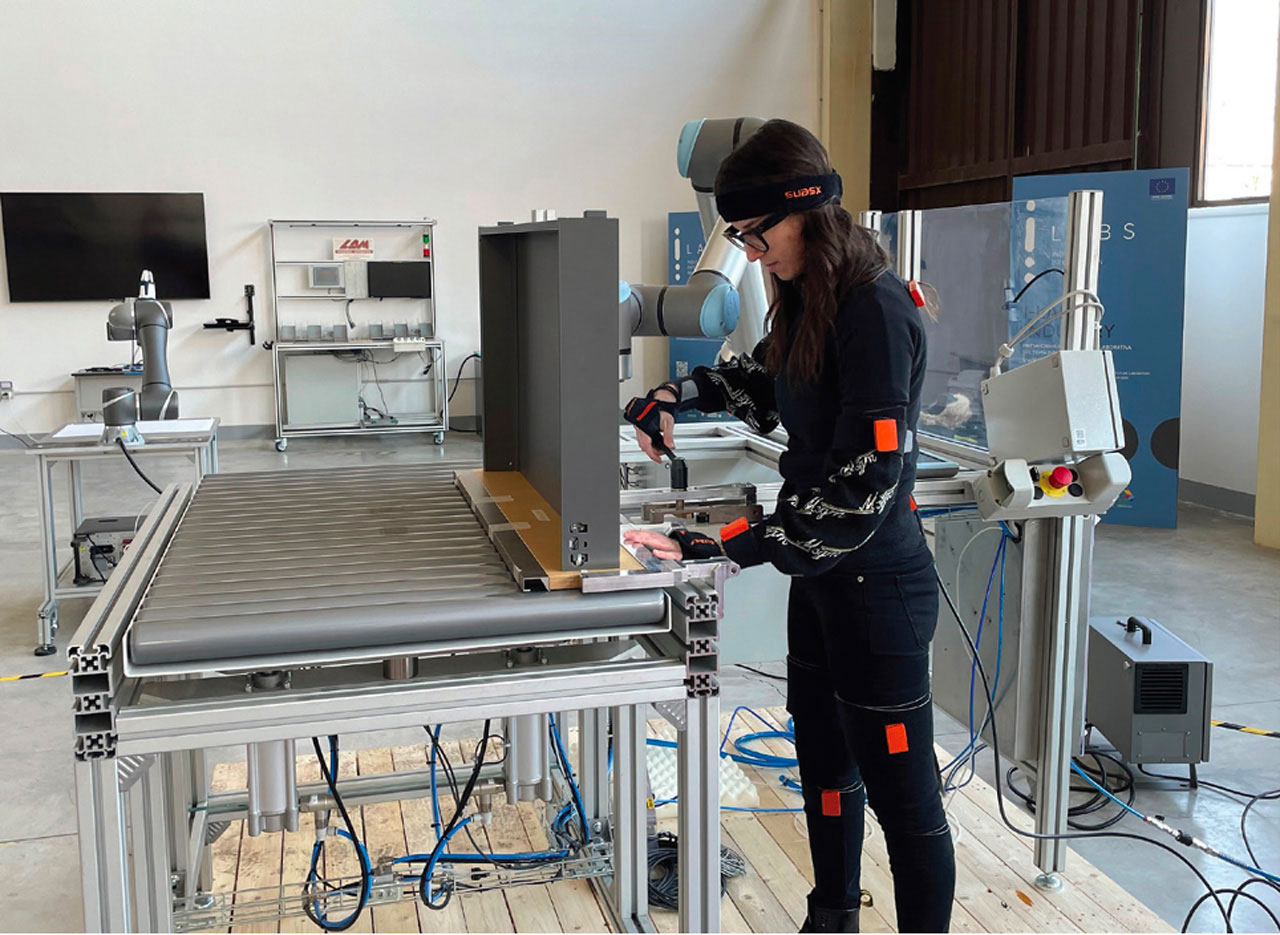
The first application consists in the study and development of a robotic system that operates on an assembly line and supports the operator in the final tasks of assembly, recording, cleaning, and quality control before packaging the furniture. A human-robot collaboration system was conceived and designed in which the robot positions the furniture in an optimized position based on the operator’s anthropometric characteristics, the product dimensions, and the specific task characteristics. The goal is to ensure greater safety and reduce ergonomic risks for the operator. The developed system integrates various devices and different technologies. In particular, it can recognize human presence, the product, and the task requirements, and consequently adapt the position of the product and the robot’s configuration. To this end, an optimization model was developed to automatically identify the position of the product while respecting technological and ergonomic constraints and minimizing the distance between the position of the product chosen by the operator and the theoretically ideal one among all admissible positions. Furthermore, a camera system was implemented to reconstruct the human skeleton and calculate the main anatomical angles in order to assess ergonomic risk in a non-invasive way and in real time. Finally, the system and the model were tested in the laboratory with excellent results.
The second application considered the study, development, and implementation of a collaborative robotic system for inserting screws on kitchen drawer units.
From the analysis of the productivity and ergonomics of three manual workstations in the drawer assembly line, ergonomic risks emerged due to repetitive movements and incorrect postures.
It was therefore decided to introduce a collaborative robot, completely modify the station layout, and rebalance the line to facilitate the screwing operation while still ensuring the necessary level of productivity.
A collaborative cell was designed and built, carrying out a risk analysis and various process simulations, until the desired results in terms of ergonomics and productivity were achieved.




 Google Chrome
Google Chrome  Mozilla Firefox
Mozilla Firefox  Microsoft Edg
Microsoft Edg  Safari
Safari