URRÀ project
HUMAN DIGITAL FLEXIBLE „FABRIK DER ZUKUNFT“ LABORATORIUM
POR EFRE 2014 – 2020 2014/2020 – 2.1 Unterstützung bei der Umsetzung komplexer Projekte für Forschungs- und Entwicklungsaktivitäten in wenigen thematisch relevanten Bereichen und bei der Anwendung technologischer Lösungen zur Umsetzung der S3, ref. POR MARCHE EFRE 2014/2020 – ACHSE 1 – OS 2 – AKTION 2.1 UNTERSTÜTZUNG DER ENTWICKLUNG VON TECHNOLOGIEPLATTFORMEN FÜR KOLLABORATIVE FORSCHUNG, ENTWICKLUNG UND INNOVATION IN DEN BEREICHEN DER INTELLIGENTEN SPEZIALISIERUNG: THEMENBEREICH „Integriertes und nutzerzentriertes Design“ Nr. 271 – 28/12/2017, ref. Teilnahmegesuch Nr. 14819, 529587|14/05/2018|R_MARCHE|GRM|IRE|A|330.30/2017/IRE/52 – Projekt HD3FLAB.
TEILNEHMER
Technische Universität der Marken, Universität Camerino, Meccano, Loccioni, Alci, Baldi, Bora, Cadland, E-Lios, Eletica, Elica, Eurosuole, Filippetti, Joytek, LUBE Küchen, Meccanotecnica Centro, Namirial, Nautes, Proel Lab, Simonelli Gruppe, Winitalia, Zannini.
ZIELE ERREICHT
LUBE Industries srl hat am Projekt URRA’ teilgenommen - das mit einer ATI-Vereinbarung zwischen wichtigen Unternehmen aus den Marken entstanden ist, die die Untersuchung, Implementierung und Validierung der kollaborativen Prozesse zwischen Robotern und Menschen sowie die Rekonfiguration des CPS (Cyber Physical System) vorsah.
Dank des Clusters und der Teilnahme aller Projektpartner hat LUBE sein Know-how in Bezug auf die Anwendungen der kollaborativen Robotik erweitert, indem es Anwendungsfallstudien vorgeschlagen hat, die direkt aus der eigenen Realität und den Produktionsanforderungen abgeleitet wurden, bis hin zur Realisierung einer kollaborativen Insel zur Unterstützung der Bearbeitung und Verschraubung von Holzteilen.
KOLLABORATIVES ROBOTERSYSTEM FÜR DIE MONTAGE VON KÜCHENMÖBELN
Bei LUBE wurden zwei Anwendungen untersucht und entwickelt, die eine Zusammenarbeit zwischen Bediener und Roboter vorsehen.
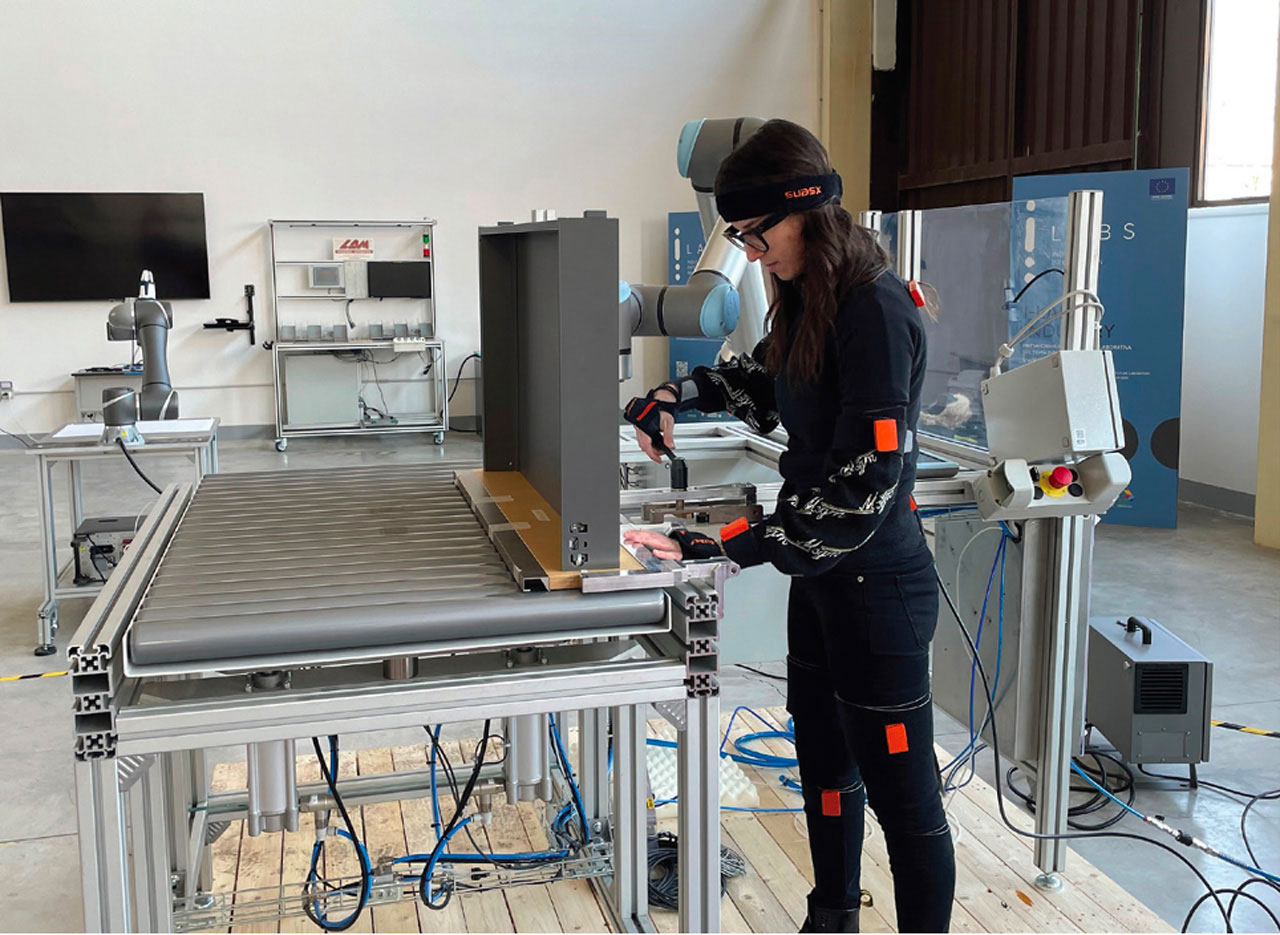
Die erste Anwendung besteht in der Untersuchung und Entwicklung eines robotischen Systems, das in der Montagelinie arbeitet und den Bediener bei den abschließenden Montage-, Einstell-, Reinigungs- und Qualitätskontrollaufgaben vor der Verpackung des Möbels unterstützt. Es wurde ein Mensch-Roboter-Kollaborationssystem entworfen und entwickelt, bei dem der Roboter das Möbelstück in einer optimierten Position in Abhängigkeit von den anthropometrischen Merkmalen des Bedieners, den Abmessungen des Produkts und den spezifischen Eigenschaften der Aufgabe positioniert. Ziel ist es, eine höhere Sicherheit zu gewährleisten und ergonomische Risiken für den Bediener zu reduzieren. Das entwickelte System integriert verschiedene Geräte und unterschiedliche Technologien. Insbesondere ermöglicht es die Erkennung der menschlichen Präsenz, des Produkts und der Anforderungen der Aufgabe und passt dementsprechend die Position des Produkts und die Konfiguration des Roboters an. Zu diesem Zweck wurde ein Optimierungsmodell entwickelt, das es ermöglicht, die Position des Produkts automatisch zu identifizieren, indem technologische und ergonomische Einschränkungen eingehalten und die Distanz zwischen der vom Bediener gewählten Produktposition und der theoretisch idealen Position unter allen zulässigen Positionen minimiert wird. Darüber hinaus wurde ein Kamerasystem implementiert, das es ermöglicht, das menschliche Skelett zu rekonstruieren und die wichtigsten anatomischen Winkel zu berechnen, um das ergonomische Risiko nicht-invasiv und in Echtzeit zu bewerten. Schließlich wurden das System und das Modell im Labor mit hervorragenden Ergebnissen getestet.
Die zweite Anwendung umfasste das Studium, die Entwicklung und die Realisierung eines kollaborativen Robotersystems für das Einsetzen von Schrauben in Küchenschubladen. Aus der Analyse der Produktivität und Ergonomie von drei manuellen Arbeitsplätzen der Schubladenmontagelinie ergaben sich ergonomische Risiken aufgrund von sich wiederholenden Bewegungen und falschen Haltungen. Daher wurde beschlossen, einen kollaborativen Roboter einzuführen, das Layout der Station vollständig zu ändern und die Linie neu auszubalancieren, um den Schraubvorgang zu erleichtern und dennoch das erforderliche Produktivitätsniveau zu gewährleisten. Es wurde eine kollaborative Zelle entworfen und realisiert, wobei eine Risikoanalyse und verschiedene Prozesssimulationen durchgeführt wurden, bis die gewünschten Ergebnisse in Bezug auf Ergonomie und Produktivität erreicht wurden.




 Google Chrome
Google Chrome  Mozilla Firefox
Mozilla Firefox  Microsoft Edg
Microsoft Edg  Safari
Safari